|
|||||||


|



|
|
 |
|
|
Strumenti |
 05-11-2008, 12:47
05-11-2008, 12:47
|
#1 |
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|
MSL - Mars Science Laboratory
Qualche foto che mette a confronto Mars Science Laboratory (lancio previsto 2009) con i MER e Sojourner.
Confronto tra le dimensioni delle ruote (da sinistra a destra Sojourner, MER e MSL):  Stesso confronto da un'altra prospettiva:  Confronto tra mockup per avere un idea delle dimensioni relative:  Lander "marziani" recenti messi a confronto: 
Ultima modifica di Rand : 19-06-2009 alle 20:22. |

|

|
|
05-11-2008, 13:05
|
#2 |
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|
Fonte di energia
Come si può vedere dal mockup questa missione non userà pannelli solari, ma MMRTG, un generatore termoelettrico a radioisotopi di nuova generazione. Questo approccio presenta diversi vantaggi: - Il calore "di scarto" prodotto dal generatore viene utilizzato per mantenere l'elettronica e gli strumenti di bordo alla giusta temperatura. Questa forma di riscaldamento non necessita di energia elettrica, lasciandone cosi' una maggiore quantità disponibile per altri compiti. - La produzione di energia non dipende dalla latitudine, stagione e dalle condizioni atmosferiche. - Estremamente affidabile e a lunga durata. Peso 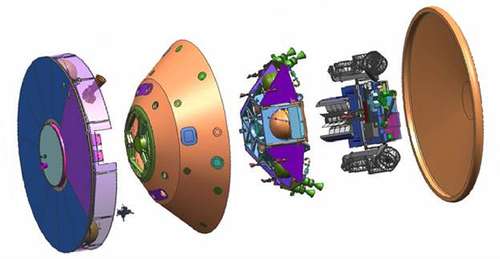 Da sinistra a destra: lo stadio di viaggio, la backshell, lo stadio di discesa, il rover e lo scudo termico. - Rover -> 850 kg - Stadio di discesa (senza propellente) -> 829 Kg - Propellente per lo stadio di discesa -> 390 Kg - Scudo termico -> 382 Kg - Stadio di viaggio (comprensivo del propellente) -> 600 kg - Backshell (la parte opposta allo scudo termico che completa il tutto) -> 349 kg Peso totale 3,400 kg Rientro, discesa ed atterraggio (EDL) L'EDL di Mars Science Laboratory si differenzia in alcuni aspetti chiave da quello dei predecessori: 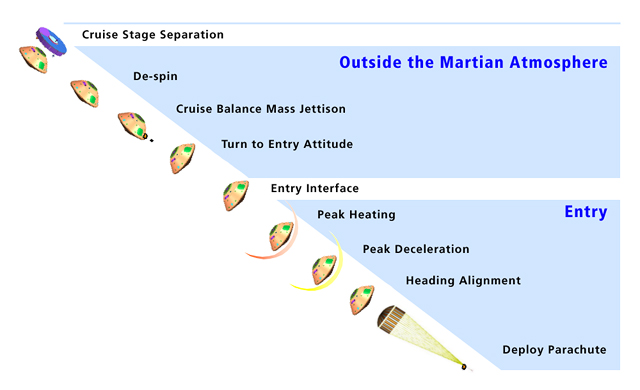 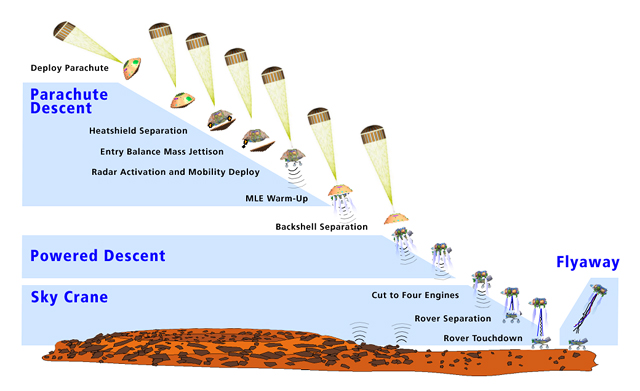 - Il sistema di EDL di Mars Science Laboratory è in grado di garantire l'atterraggio in un raggio di 20 Km contro le centinaia di Km dei lander precedenti. - Il "classico" sistema ad airbag non è in grado di far atterrare in modo sicuro un rover del peso di MSL (senza crescere troppo di peso) ed è stato quindi sostituito da un nuovo sistema denominato " sky-crane", il cui funzionamento è illustrato nell'immagine precedente:
Strumenti 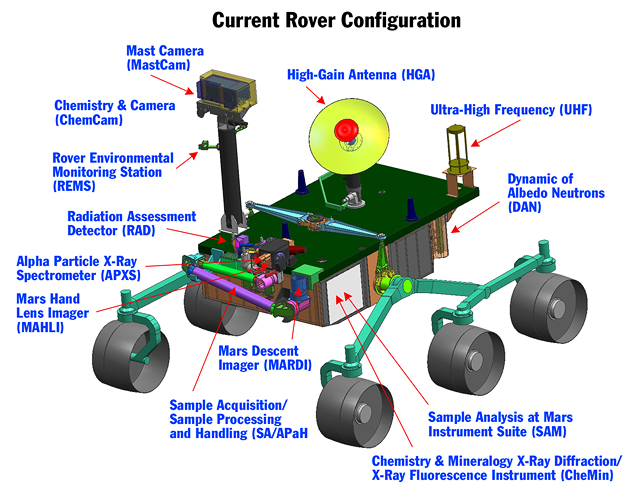 - Mast Camera (Mastcam) 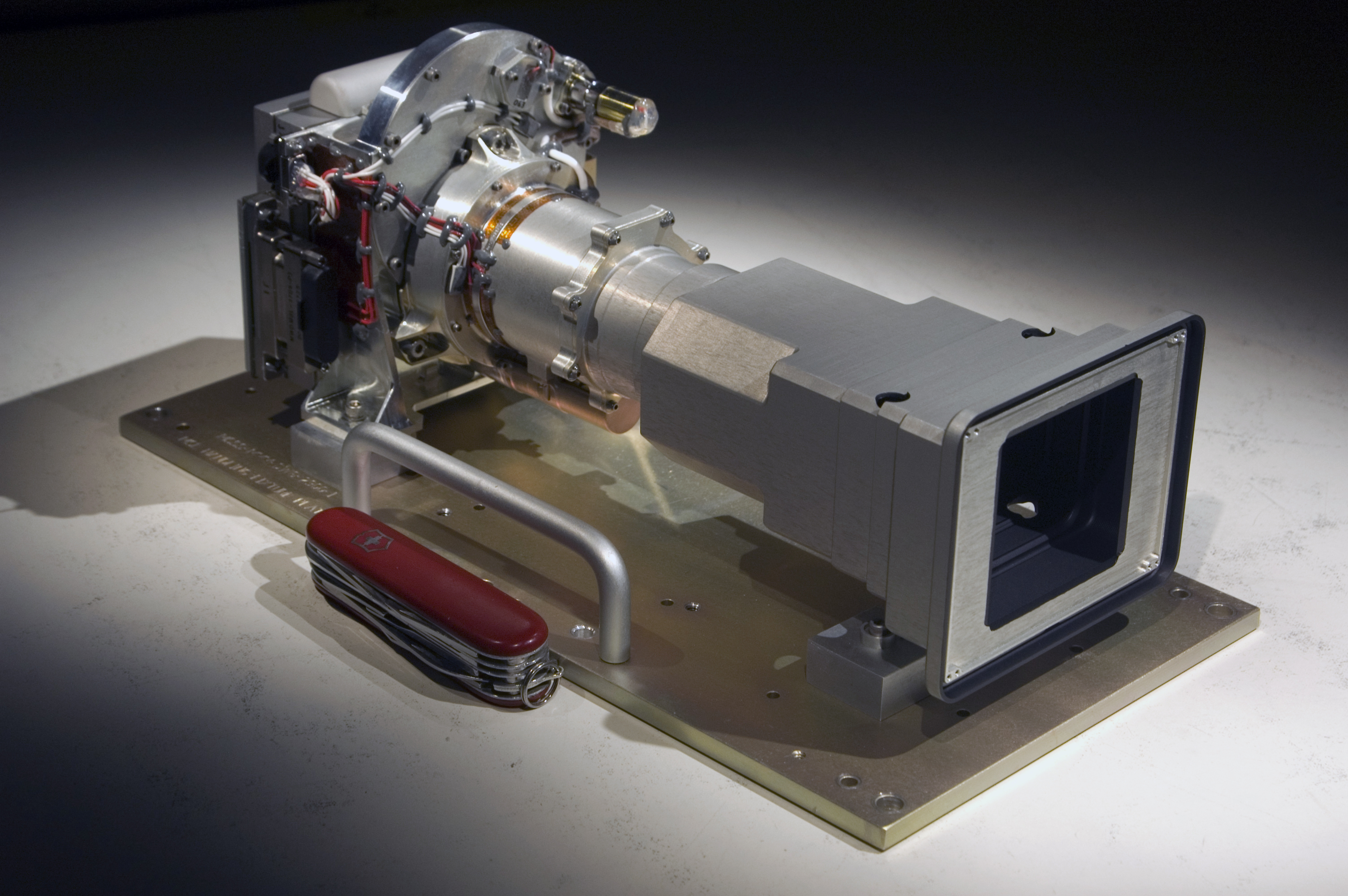  La fotocamera principale del rover (l'equivalente della Pancam dei MER). Consiste in 2 diverse fotocamere montate sull' "albero" che si estende sopra al rover. Realizzato da: Malin Space Science Systems Parametri principali
Qui e qui ci sono informazioni più dettagliate. - Mars Descent Imager (MARDI) 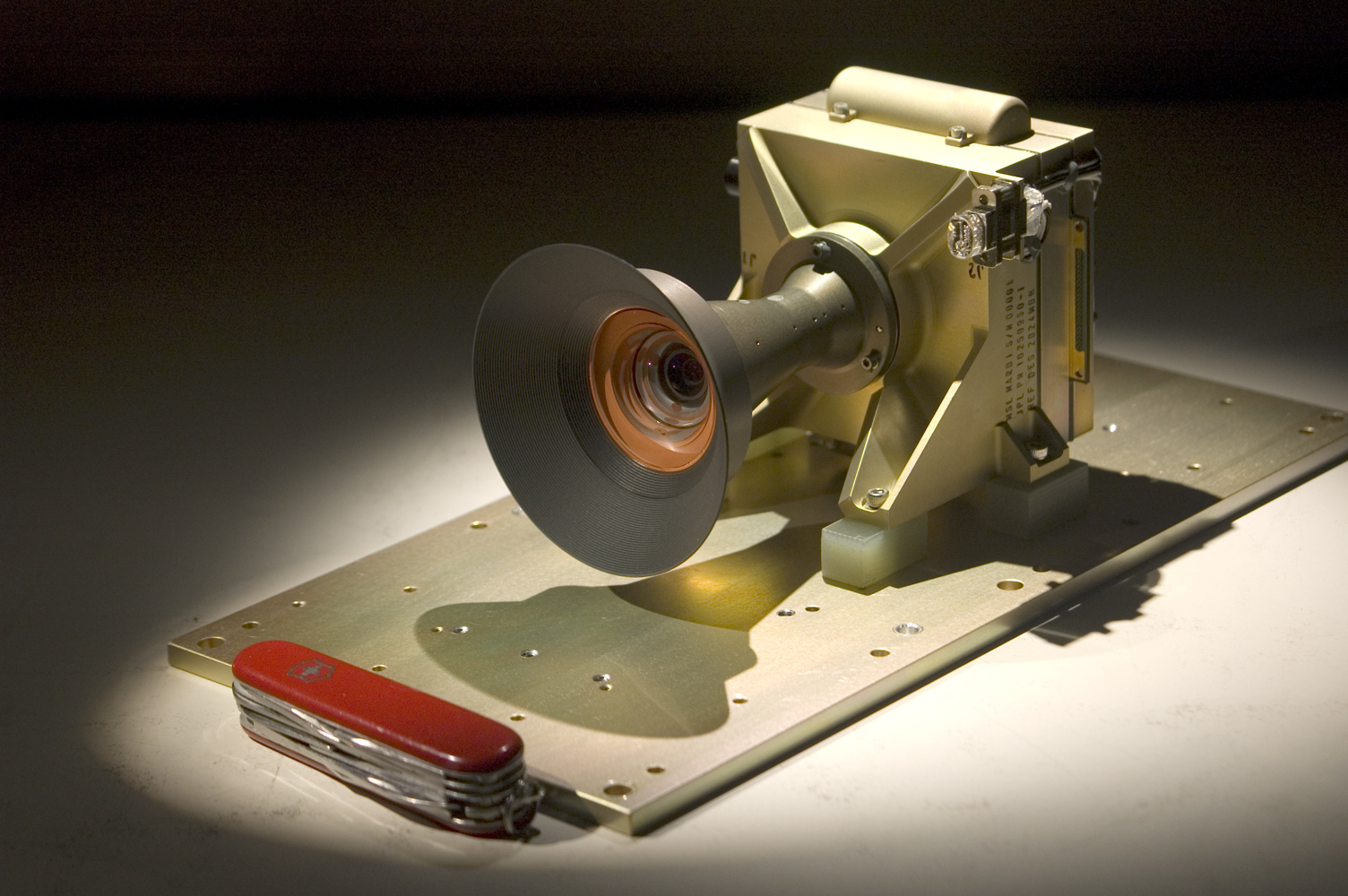 Fotocamera usata per acquisire immagini nel corso della fase di atterraggio del rover, i dati raccolti verranno poi utilizzati per pianificare l'esplorazione nelle fasi iniziali della missione. Anche se non è un obbiettivo primario dello strumento è previsto un successivo uso per aiutare la "guida automatica" del rover e condurre studi geologici. Realizzato da: Malin Space Science Systems Parametri principali
- Mars Hand Lens Imager (MAHLI)  La fotocamera dedicata alle osservazioni ravvicinate. MAHLI è in grado di risolvere particolari fino a 12.5 micrometri e dispone di illuminazione incorporata. Realizzato da: Malin Space Science Systems Parametri principali
- Alpha Particle X-Ray Spectrometer (APXS)  Versione migliorata dell'analogo strumento in dotazione ai MER. Permette di determinare la presenza in una roccia/terreno di alcuni elementi. Realizzato da: MDA Corporation (finanziato dalla Canadian Space Agency) Parametri principali
- Chemistry & Camera (ChemCam)  Permette l'analisi spettroscopica a distanza delle rocce/suolo. Funziona emettendo un raggio laser verso il bersaglio prescelto in grado di vaporizzare una piccola quantità di materiale che viene poi analizzata a distanza. Realizzato da: Los Alamos National Laboratory e Centre d'Etude Spatiale des Rayonnements (CESR). Contributi importanti di JPL, Ocean Optics Inc. e del Commissariat a l'Energie Atomique. Parametri principali
- Chemistry & Mineralogy X-Ray Diffraction (CheMin)  Lo scopo di CheMin è misurare l'abbondanza di vari tipi di minerali nelle rocce/terreno marziano: grazie a queste analisi sarà possibile studiare più nel dettaglio il ruolo che ha avuto l'acqua nella loro formazione e cercare indizi sul fatto che le condizioni ambientali del passato permettessero la formazione della vita. Realizzato da: ? Parametri principali
Qui sono reperibili maggiori informazioni. - Sample Analysis at Mars (SAM) Instrument Suite  SAM, che da solo occupa più della metà dello spazio/peso dedicato alla strumentazione scientifica su MSL, è dedicato ad indagare la presenza di composti a base di carbonio (metano incluso) e a esplorare i modi in cui vengono generati e distrutti nell'ambiente marziano. SAM è inoltre in grado di misurare l'abbondanza di altri elementi leggeri associati con la vita quali l'idrogeno, l'ossigeno e l'azoto. Realizzato da: NASA (Goddard Space Flight Center) Parametri principali
- Radiation Assessment Detector (RAD)  Uno dei primi strumenti specificamente realizzati in vista di una futura esplorazione umana, RAD è in grado di misurare tutte le radiazioni ad alta energia "presenti" sulla superficie di Marte. Questi dati, oltre a permettere di calcolare la dose equivalente a cui gli esploratori umani saranno sottoposti, verranno utilizzati per valutare gli effetti delle radiazioni sulla composizione del suolo e l'ostacolo che rappresentano allo sviluppo/sopravvivenza di eventuali batteri. Realizzato da: ? Parametri principali
- Dynamic Albedo of Neutrons (DAN) Misurando la riflessione di un fascio di neutroni da parte del suolo marziano DAN è in grado di rilevare la presenza di acqua (o in generale materiali contenenti H- e OH-) nelle rocce/terreno fino a 1-2 metri di profondità e di identificare eventuali strati di ghiaccio/acqua. Realizzato da: Federal Space Agency of Russia Parametri principali
Qui ci sono i dettagli riguardanti lo strumento. - Rover Environmental Monitoring Station (REMS)  Come suggerisce il suo nome, REMS è in grado di monitorare l'ambiente nei pressi del rover. Realizzato da: Centro de Astrobiologia (CAB) Parametri principali
- Mars Science Laboratory Entry Descent and Landing Instrument (MEDLI) Una suite di sensori integrata nello scudo termico al fine di acquisire dati sulle sue caratteristiche aerodinamiche e termiche durante l'EDL. I dati acquisiti verranno utilizzati nella progettazione di future missioni verso Marte. Realizzato da: NASA (in particolare i centri di ricerca Langley e Ames) Parametri principali
Componenti interni - MMM Digital Electronics Assembly (DEA)  Il DEA interfaccia gli strumenti Mastcam, MAHLI e MARDI con il resto del rover, è in grado di processare in tempo reale le immagini ed eventualmente comprimerle in JPEG. Realizzato da: Malin Space Science Systems Parametri principali
Ultima modifica di Rand : 02-05-2010 alle 10:38. |
|
|
|



|
05-11-2008, 13:22
|
#3 |
|
Senior Member
Iscritto dal: May 2000
Città: Milano
Messaggi: 13506
|
figata!
ho letto le caratteristiche degli strumenti di bordo su wikipedia: direi che per molti aspetti è un GROSSO passo avanti rispetto ai modelli precedenti!!!
__________________
Canon EOS 300D; Canon EOS 40D; 17-40 f4 L; EF 50 f1.8; Sigma EX 28-70 f2.8; 70-200 f4 L; Sigma APO 100-300mm F4 EX IF HSM; TC Sigma 1.4x EX Apo DG; Canon EOS 5 con VG; Flash SpeedLite 200E; Canon T50; FD 28 f2.8; FD 50 f1.8; FD 70-210 f4 |
|
|
|
|
05-11-2008, 20:40
|
#4 |
|
Senior Member
Iscritto dal: Oct 2000
Città: UK
Messaggi: 7447
|
E' un bel bestione, ci sarà da divertirsi...
__________________
"Questo forum non è un fottuto cellulare quindi scrivi in italiano, grazie." (by Hire) Le mie foto su Panoramio - Google Earth |
|
|
|
|
16-12-2008, 13:24
|
#5 | ||
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|
MSL è stato rimandato al 2011 a causa di un ritardo nella consegna degli attuatori.
Essendo questi fondamentali per la riuscita della missione (un rover con le parti mobili che non funzionano non è molto utile) si è scelto di rimandare il lancio alla finestra utile successiva (2009 -> 2011): Quote:
C'è però anche una buona notizia: per gestire la crescente complessità e i costi delle missioni verso Marte, ESA e NASA hanno annunciato una più stretta collaborazione: Quote:
|
||
|
|
|
|
17-12-2008, 21:25
|
#6 |
|
Senior Member
Iscritto dal: Aug 2005
Messaggi: 2052
|
Molto dispiaciuto per il rinvio della missione. Speriamo che il MSL sia duraturo come Spirit e Opportunity.
Molto interessante la parte sulle unione delle forze tra ESA e Nasa per l'esplorazione marziani. Esiste un motivo perche' non esista un'agenzia spaziale internazionale?
__________________
ciao |
|
|
|
|
17-12-2008, 21:34
|
#7 |
|
Senior Member
Iscritto dal: Aug 2002
Messaggi: 1266
|
Sono completamente contrario all'uso dell'atomo come fonte di energia: il nucleare è pericoloso e non va usato a prescindere. Si può usare l'energia solare, altrimenti ciccia.
|
|
|
|
|
17-12-2008, 21:37
|
#8 | |
|
Senior Member
Iscritto dal: Oct 2000
Città: UK
Messaggi: 7447
|
Quote:
__________________
"Questo forum non è un fottuto cellulare quindi scrivi in italiano, grazie." (by Hire) Le mie foto su Panoramio - Google Earth |
|
|
|
|

|
17-12-2008, 21:48
|
#9 | |
|
Senior Member
Iscritto dal: Sep 2006
Messaggi: 6961
|
Quote:
Manco sai di cosa stai parlando, siamo rimasti al "nucleare pericoloso omg" senza saper minimamente qualcosa sull'argomento...
__________________

|
|
|
|
|
|
17-12-2008, 23:57
|
#10 | |||
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|
Quote:
Quote:
Quote:
Ultima modifica di Rand : 18-12-2008 alle 00:13. |
|||
|
|
|
|
22-02-2009, 19:42
|
#11 | ||||||||||
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|
"Rubato" da unmannedspaceflight un po' di risposte sul sistema Skycrane da un ingegnere che ci lavora (tutte le opinioni sono sue e non la posizione ufficiale di NASA/JPL/Caltech):
Quote:
Apparently I exceeded the quote count limit for replies so ... I will respond to Oersted's questions by italicizing his questions ... Despite our slip, I think the terminal descent & skycrane maneuver part of EDL (the guidance and control algorithms, the propulsion, the bridle and umbilical device (BUD), radar, the throttle valves and control on the descent stage) are all in pretty good shape at the moment (compared with the rover). EDL & skycrane was pretty much on track for '09. Which is not to say that we do not have a lot of work to go. So like you Oersted, I also feel that we will have a mature and well-understood system by the time of EDL. Ironically this EDL system (at least has the potential) of being easier to prove than MER and MPF. It is very similar to how we proved Phoenix's EDL. Quote:
Quote:
Quote:
I saw some great answers above, but I will throw in my 2 cents. I would say that parachute/unthrottled solid rocket/airbag combo cannot deliver such a heavy system to the ground safely. As you might recall in one of the MER NOVA specials (where Dan Maas made a cool but terrifying animation of a high horizontal velocity landing that tore the airbags to shreds), the MER combo (even with the TIRS and DIMES add-on) resulted in uncomfortably high horizontal ("tangential") impact velocity and could also threaten the "normal" impact velocity airbag capability envelope. We found on MER that as the mass of the landed stuff increased, even with larger airbags, given available fabric strength we also needed to reduce the impact velocity. We found that we could not do that with a (unthrottlable) solid rocket propulsion system. If we were to swap the RAD and TIRS motors with a throttled liquid propulsion system, we COULD land with larger airbags (because the throttled system gives you a LOT more velocity control). However once you do that you now have the ability to control and reduce the touchdown velocity to the point that you really don't need airbags, nor a lander nor a righting systems (like the MPF/MER petals). In fact you can land on your wheels ... But that pesky parachute is still hanging on trying to yank the prop system this way and that ... (it gave us fits on MER) .. what if we ditch the parachute like Phoenix does? Viola .. you get MSL's EDL system. You might recall picts of the old 2003 Mars Sample Return Lander that was being considered in the late 1990s (prior to the loss of MPL). It was basically an oversized Viking lander (same as Phoenix except that the descent engines were throttled rather than the pulse mode used by Phoenix). We were trying to use that lander design to land a large (MER-sized) rover on top of its upper equipment deck. The only trouble was that we needed a lot of heavy ramp hardware to get that rover down about a meter off of that deck down to the surface of Mars. (If your rover is still a meter above the surface of Mars, you really can't say that you have landed yet.) Quote:
Quote:
The rover's computer can easily do the same thing as your hand. It uses its inertial measurement unit on the descent stage to feel the same forces your fingers feel - completely inertially ... no strain gauges or load cells required! Quote:
That is correct. Like MER and MPF, we needed to cant the rocket nozzles to prevent impingement on the rover. You might ask, why not leave the thrust UNDER the rover (like the pallet lander design option)? There are two answers, the first is that our fuel tanks take a lot of space and could not fit inside the pallet lander. The second is that, despite what you think you know about landing rockets "tail first" (with the thrusters close to the surface: like Buck Rogers, Apollo, Viking, DC-X and Phoenix), you might be surprised that there are a lot of interesting technical challenges with putting thrusters so close to the surface. (Did you know that the Apollo landers each sent a cloud of lunar dust particles into lunar orbit during each landing? The command module flew through that fine cloud.) While not insurmountable, it does present some interesting challenges. For example, to overcome ground effects of the thrusters, we had to land Phoenix about 5 times faster than the MSL rover will touch down. (Knowing we were going to landing Phoenix on a flat tundra-like surface made our EDL job a lot easier.) There are some advantages to keeping your thrusters a few meters above the ground. Quote:
great question ... we considered using the bridle deployment as a touchdown aid for a long time before we decided that it was too complex. We time the start of the deployment phase so that the mobility system and the bridle deployment are all completed prior to landing. This made testing a lot easier too. Quote:
We wait until the vehicle is descending vertically at a constant velocity (and at the correct estimated height) before the rover is released and is lowered on the bridle. It does take a bit more fuel but not a lot. Quote:
COULD we add a camera and do terminal hazard assessment and avoidance in real time? Maybe. But that is a lot of work that we really do not need to do right now. Maybe someday if we were to do this again and we wanted to land on more challenging terrain (and to be sure, there is a lot of that kind of terrain on Mars) we could do terrain-relative navigation and use on-board maps to land on a-priori safe sites (my personal preference). Maybe. |
||||||||||
|
|
|
|
02-03-2009, 13:54
|
#12 | ||
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|
Articolo che parla dei motivi tecnici del ritardo si MSL. Un paio di estratti:
Quote:
Quote:
|
||
|
|
|
|
04-03-2009, 16:37
|
#13 |
|
Senior Member
Iscritto dal: Sep 2007
Città: napoli city
Messaggi: 1315
|
http://en.wikipedia.org/wiki/Compari...he_Mars_rovers
quali sono i criteri con il quale si scelgono le cpu per questi progetti?? perchè ad esempio il processo produttivo 250nm foto litografia non viene considerato superato??? grazie |
|
|
|
|
04-03-2009, 16:39
|
#14 | |
|
Senior Member
Iscritto dal: Oct 2000
Città: UK
Messaggi: 7447
|
Quote:
__________________
"Questo forum non è un fottuto cellulare quindi scrivi in italiano, grazie." (by Hire) Le mie foto su Panoramio - Google Earth |
|
|
|
|
|
04-03-2009, 18:44
|
#15 |
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|

|
|
|
|
|
05-03-2009, 00:09
|
#16 |
|
Senior Member
Iscritto dal: Oct 2000
Città: UK
Messaggi: 7447
|
porca boia che bestione, è grande come un'auto...
__________________
"Questo forum non è un fottuto cellulare quindi scrivi in italiano, grazie." (by Hire) Le mie foto su Panoramio - Google Earth |
|
|
|
|
05-03-2009, 01:48
|
#17 | |
|
Senior Member
Iscritto dal: Jun 2003
Messaggi: 3151
|
Questo qua smuoverà dune intere, altro che problemi con insabbiamenti vari, peccato per il ritardo!
Quote:

__________________
Guardate il sorriso, guardate il colore, come giocan sul viso di chi cerca lamore: ma lo stesso sorriso, lo stesso colore, dove sono sul viso di chi ha avuto lamore? La sofferenza è una promessa che la vita mantiene sempre. |
|
|
|
|
|
09-04-2009, 16:29
|
#18 |
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|
Non è nuovissima, ma personalmente non l'avevo mai vista:
http://mars.jpl.nasa.gov/msl/spotlig...20081119_1.gif Ultima modifica di Rand : 25-12-2009 alle 10:51. |
|
|
|
|
09-04-2009, 16:33
|
#19 |
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|
Qualche altra immagine:
http://mars.jpl.nasa.gov/msl/spotlig...112_MSL_30.jpg http://mars.jpl.nasa.gov/msl/spotlig...112_MSL_31.jpg http://mars.jpl.nasa.gov/msl/spotlig...112_MSL_35.jpg Ultima modifica di Rand : 19-06-2009 alle 20:24. |
|
|
|
|
09-04-2009, 16:36
|
#20 |
|
Senior Member
Iscritto dal: Apr 2006
Messaggi: 1464
|
http://mars.jpl.nasa.gov/msl/spotlig...20081119_3.gif
http://mars.jpl.nasa.gov/msl/spotlig...20081119_2.gif Ultima modifica di Rand : 19-06-2009 alle 20:24. |
|
|
|
|
|
| Strumenti | |


|
|

Tutti gli orari sono GMT +1. Ora sono le: 12:03.