Fonte di energia
Come si può vedere dal mockup questa missione non userà pannelli solari, ma
MMRTG, un
generatore termoelettrico a radioisotopi di nuova generazione.
Questo approccio presenta diversi vantaggi:
- Il calore "di scarto" prodotto dal generatore viene utilizzato per mantenere l'elettronica e gli strumenti di bordo alla giusta temperatura. Questa forma di riscaldamento non necessita di energia elettrica, lasciandone cosi' una maggiore quantità disponibile per altri compiti.
- La produzione di energia non dipende dalla latitudine, stagione e dalle condizioni atmosferiche.
- Estremamente affidabile e a lunga durata.
Peso
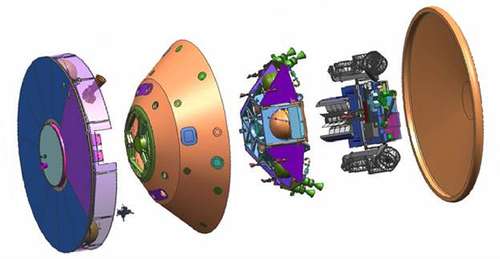 Da sinistra a destra: lo stadio di viaggio, la backshell, lo stadio di discesa, il rover e lo scudo termico.
Da sinistra a destra: lo stadio di viaggio, la backshell, lo stadio di discesa, il rover e lo scudo termico.
- Rover -> 850 kg
- Stadio di discesa (senza propellente) -> 829 Kg
- Propellente per lo stadio di discesa -> 390 Kg
- Scudo termico -> 382 Kg
- Stadio di viaggio (comprensivo del propellente) -> 600 kg
- Backshell (la parte opposta allo scudo termico che completa il tutto) -> 349 kg
Peso totale
3,400 kg
Rientro, discesa ed atterraggio (EDL)
L'EDL di Mars Science Laboratory si differenzia in alcuni aspetti chiave da quello dei predecessori:
- Il sistema di EDL di Mars Science Laboratory è in grado di garantire l'atterraggio in un raggio di 20 Km contro le centinaia di Km dei lander precedenti.
- Il "classico" sistema ad airbag non è in grado di far atterrare in modo sicuro un rover del peso di MSL (senza crescere troppo di peso) ed è stato quindi sostituito da un nuovo sistema denominato " sky-crane", il cui funzionamento è illustrato nell'immagine precedente:
- Il paracadute ha rallentato sufficientemente il veicolo e lo scudo termico è stato espulso.
- Lo stadio di discesa si separa dal backshell.
- Usando i suoi 4 motori direzionabili lo stadio di discesa diminuisce la velocità di caduta e azzera l'effetto di eventuali venti orizzontali.
- Quando la velocità verticale/di caduta è quasi zero il rover viene sganciato dallo stadio di discesa e rimane appeso sotto di esso, nel frattempo le ruote del rover si posizionano nella loro posizione operativa.
- Una volta che il rover ha toccato terra il cavo che lo teneva appeso veine tagliato.
- Lo stadio di discesa si va a schiantare lontano da MSL.
Strumenti
- Mast Camera (Mastcam)
La fotocamera principale del rover (l'equivalente della Pancam dei MER). Consiste in 2 diverse fotocamere montate sull' "albero" che si estende sopra al rover.
Realizzato da: Malin Space Science Systems
Parametri principali
- Altezza dal suolo: circa 2 metri
- Può acquisire video a 720p (1280 by 720 pixel) fino a 10 frame al secondo.
- Può acquisire un panorama a colori completo (a 360°) intorno al rover in meno di 1 ora.
- Elettronica di gestione dedicata che processa le immagini/video senza pesare sul "computer" principale.
- Comprende un buffer dedicato (8 Gigabyte) per immagazzinare le immagini/video prima della loro trasmissione a Terra.
- Capacità di mettere a fuoco tra 2.1 metri e infinito. Dispone di autofocus.
- Le due fotocamere che compongono il sistema hanno una lunghezza focale diversa (34 e 100 mm). Una è adatta ad acquisire immagini a media distanza (come la Pancam), l'altra per studiare il panorama a lunga distanza.
- Utilizza un "Bayer Pattern Filter CCD" ed è quindi in grado di acquisire immagini a colori "veri" in un unico scatto (come le normali macchine fotografiche). Sono comunque disponibili una serie di filtri per acquisire immagini monocromatiche a diverse lunghezze d'onda.
Qui e
qui ci sono informazioni più dettagliate.
- Mars Descent Imager (MARDI)
Fotocamera usata per acquisire immagini nel corso della fase di atterraggio del rover, i dati raccolti verranno poi utilizzati per pianificare l'esplorazione nelle fasi iniziali della missione. Anche se non è un obbiettivo primario dello strumento è previsto un successivo uso per aiutare la "guida automatica" del rover e condurre studi geologici.
Realizzato da: Malin Space Science Systems
Parametri principali
- Le immagini sono di dimensione 1600 x 1200 pixel. Verranno acquisite 5 immagini per secondo dal distacco dello scudo termico all'atterraggio.
- La parte elettronica è in comune con MAHLI e Mastcam (vedi MMM Digital Electronics Assembly).
- I dati acquisiti permetteranno di realizzare un video ad alta definizione della discesa del rover su Marte.
- Utilizza un "Bayer Pattern Filter CCD" ed è quindi in grado di acquisire immagini a colori "veri" in un unico scatto (come le normali macchine fotografiche).
Qui e
qui maggiori informazioni.
- Mars Hand Lens Imager (MAHLI)
La fotocamera dedicata alle osservazioni ravvicinate. MAHLI è in grado di risolvere particolari fino a 12.5 micrometri e dispone di illuminazione incorporata.
Realizzato da: Malin Space Science Systems
Parametri principali
- Le immagini sono di dimensione 1600 x 1200 pixel.
- La parte elettronica è in comune con MAHLI e Mastcam (vedi MMM Digital Electronics Assembly).
- Oltre alla normale messa a fuoco a 22.5 mm può mettere a fuoco anche a infinito e quindi essere utilizzato anche per ispezionare parti del rover o altro.
- Può acquisire immagini multiple dello stesso obbiettivo e utilizzarle per costruire un immagine "focus-migliore" e una "range map" (focal plane merging).
- L'ottica dispone di una copertura anti-polvere. Se necessario è possibile mettere a fuoco e fotografare anche anche attraverso questa copertura.
- Dispone di 4 led bianchi, divisi in 2 gruppi che possono essere accesi e spenti indipendentemente, e 2 UV. Quelli bianchi servono per illuminare i "bersagli" di notte o se sono in ombra mentre quelli UV per mettere in evidenza eventuali materiali fluorescenti.
- Utilizza un "Bayer Pattern Filter CCD" ed è quindi in grado di acquisire immagini a colori "veri" in un unico scatto (come le normali macchine fotografiche).
Qui e
qui maggiori informazioni.
- Alpha Particle X-Ray Spectrometer (APXS)
Versione migliorata dell'analogo strumento in dotazione ai MER. Permette di determinare la presenza in una roccia/terreno di alcuni elementi.
Realizzato da: MDA Corporation (finanziato dalla Canadian Space Agency)
Parametri principali
- Posizionato sul braccio robotico.
- Un bersaglio di calibrazione (basaltico) è montato sulla struttura del rover.
- La sensibilità è stata migliorata di un fattore 3 rispetto all'equivalente strumento montato sui MER. E' ora possibile un analisi completa entro circa 3 ore.
- Operabile durante il giorno grazie all'aggiunta di una cella di Peltier che raffredda il sensore di misurazione dei raggi X (temperatura massima per un funzionamento ottimale salita dai -40°C dei MER a -5°C).
- Aumentata la forza della sorgente di raggi X rispetto all'equivalente strumento montato sui MER. Questo aumenta la sensibilità per alcuni elementi.
- Non è presente il canale alpha (non è possibile svolgere analisi spettroscopiche con tecnica RBS).
- E possibile usare delle analisi spettroscopiche di corta durata (circa 10 secondi) per guidare il braccio quando è in prossimità di "oggetti".
Qui maggiori informazioni.
- Chemistry & Camera (ChemCam)
Permette l'analisi spettroscopica a distanza delle rocce/suolo. Funziona emettendo un raggio laser verso il bersaglio prescelto in grado di vaporizzare una piccola quantità di materiale che viene poi analizzata a distanza.
Realizzato da: Los Alamos National Laboratory e
Centre d'Etude Spatiale des Rayonnements (CESR). Contributi importanti di JPL, Ocean Optics Inc. e del Commissariat a l'Energie Atomique.
Parametri principali
- Costituito da due parti: una sull' "albero" che comprende l'RMI e il telescopio necessario a focalizzare il laser/acquisire la luce risultante e una nel corpo principale del rover che contiene gli spettrografi.
- Ripetendo gli impulsi laser è possibile rimuovere remotamente lo strato di polvere dalle rocce marziane.
- Oltre alla modalità "classica" sopra descritta è possibile utilizzare il telescopio in congiunzione con l'RMI (Remote Micro-Imager) per acquisire immagini molto dettagliate (5-10 volte di più di quanto possibile con le fotocamere dei MER).
- E' possibile analizzare zone molto piccole (meno di 1 mm), altrimenti difficilmente isolabili.
- Basso consumo energetico grazie ai tempi di analisi molto brevi.
Qui maggiori informazioni.
- Chemistry & Mineralogy X-Ray Diffraction (CheMin)
Lo scopo di CheMin è misurare l'abbondanza di vari tipi di minerali nelle rocce/terreno marziano: grazie a queste analisi sarà possibile studiare più nel dettaglio il ruolo che ha avuto l'acqua nella loro formazione e cercare indizi sul fatto che le condizioni ambientali del passato permettessero la formazione della vita.
Realizzato da: ?
Parametri principali
- Posizionato all'interno del corpo del rover.
- La ruota dei campioni dispone di 27 celle riutilizzabili, a cui si aggiungono 5 che contengono dei materiali di riferimento.
- Un'analisi richiede fino a 10 ore. Si prevede che ognuna verrà effettuata nel corso di due o più notti.
- Non viene offerta la possibilità di conservare un campione già analizzato per una successiva ri-analisi.
Qui sono reperibili maggiori informazioni.
- Sample Analysis at Mars (SAM) Instrument Suite
SAM, che da solo occupa più della metà dello spazio/peso dedicato alla strumentazione scientifica su MSL, è dedicato ad indagare la presenza di composti a base di carbonio (metano incluso) e a esplorare i modi in cui vengono generati e distrutti nell'ambiente marziano. SAM è inoltre in grado di misurare l'abbondanza di altri elementi leggeri associati con la vita quali l'idrogeno, l'ossigeno e l'azoto.
Realizzato da: NASA (Goddard Space Flight Center)
Parametri principali
- Peso: circa 38 Kg.
- Posizionato all'interno del corpo del rover.
- Comprende 3 strumenti uno spettrometro di massa, un gascromatografo e uno spettrometro laser "regolabile".
- Dispone di 74 contenitori (non riutilizzabili a quanto ho capito) per l'analisi di campioni solidi.
- Oltre ai classici campioni solidi può acquisire direttamente campioni gassosi (di atmosfera) senza utilizzare i contenitori.
Qui sono reperibili maggiori informazioni.
- Radiation Assessment Detector (RAD)
Uno dei primi strumenti specificamente realizzati in vista di una futura esplorazione umana, RAD è in grado di misurare tutte le radiazioni ad alta energia "presenti" sulla superficie di Marte.
Questi dati, oltre a permettere di calcolare la dose equivalente a cui gli esploratori umani saranno sottoposti, verranno utilizzati per valutare gli effetti delle radiazioni sulla composizione del suolo e l'ostacolo che rappresentano allo sviluppo/sopravvivenza di eventuali batteri.
Realizzato da: ?
Parametri principali
- Posizionato all'interno al corpo del rover.
- La dimensione è all'incirca quella di un pacchetto da 6 lattine.
- Attivo durante tutta la missione, compreso il viaggio verso Marte. Il piano attuale prevede di monitorare per circa 15 minuti ogni ora.
- Impatto minimo sulla massa del rover: solo 1.56 Kg di peso.
- In grado di rilevare un ampia gamma di radiazioni:
Qui maggiori informazioni.
- Dynamic Albedo of Neutrons (DAN)
Misurando la riflessione di un fascio di neutroni da parte del suolo marziano DAN è in grado di rilevare la presenza di acqua (o in generale materiali contenenti H- e OH-) nelle rocce/terreno fino a 1-2 metri di profondità e di identificare eventuali strati di ghiaccio/acqua.
Realizzato da: Federal Space Agency of Russia
Parametri principali
- 2 modalità di funzionamento: attiva e passiva.
- Quella passiva serve per monitorare il contenuto medio d'acqua del suolo e il "sottofondo" naturale di neutroni.
- In quella attiva il rover emette dei neutroni e misura la riflessione da parte del suolo. Le sensitività varia tra circa l'1% al 0.1/0.3% a seconda della durata delle misurazioni (da meno di 2 minuti a circa 30).
- La profondità di rilevamento è di 1-2 metri.
Qui ci sono i dettagli riguardanti lo strumento.
- Rover Environmental Monitoring Station (REMS)
Come suggerisce il suo nome, REMS è in grado di monitorare l'ambiente nei pressi del rover.
Realizzato da: Centro de Astrobiologia (CAB)
Parametri principali
- Misura pressione atmosferica, umidità, radiazione ultravioletta, velocità e direzione del vento e temperatura dell'aria e del suolo.
- Realizzato per osservazioni sistematiche: acquisisce ogni ora 5 minuti di dati con frequenza 1 Hz. Il ciclo di risveglio/acquisizione/riposo è gestito autonomamente dallo strumento ed è indipendente dal fatto che il rover sia attivo o no.
- Possibilità di definire periodi di acquisizione personalizzati oltre a quelli della modalità automatica.
- In caso durante l'attività siano rilevati eventi atmosferici REMS prolunga autonomamente il periodo di acquisizione.
- I sensori sono disposti su 2 aste montate sull' "albero" dove sono alloggiati anche Mastcam e ChemCam, ad un'altezza dal suolo di circa 1.5 metri...
- ...con l'eccezione di quello relativo agli ultravioletti che è montato sul piano del rover.
Qui ci sono i dettagli riguardanti lo strumento.
- Mars Science Laboratory Entry Descent and Landing Instrument (MEDLI)
Una suite di sensori integrata nello scudo termico al fine di acquisire dati sulle sue caratteristiche aerodinamiche e termiche durante l'EDL. I dati acquisiti verranno utilizzati nella progettazione di future missioni verso Marte.
Realizzato da: NASA (in particolare i centri di ricerca Langley e Ames)
Parametri principali
- Costituito da 2 sottosistemi: MISP e MEADS.
- MISP (MEDLI Integrated Sensor Plugs) è composto da 2 tipi di sensori: termocoppie e sensori di "recessione". Lo scopo è quello di misurare come varia la temperatura a diverse profondità dello scudo termico e l'andamento temporale della sua ablazione.
- MEADS (Mars Entry Atmospheric Data System) è composto da sensori di pressione disposti "a croce". Lo scopo è misurare l'orientamento dello stadio di discesa durante l'EDL.
- Il peso totale del sistema è di 15 Kg, di cui 2.5 Kg sull'aeroshell e 12.5 Kg sullo scudo termico (dove però l'aumento di massa è controbilanciato dal fatto che è possibile eliminare la stessa massa di zavorra).
- I dati vengono acquisiti vengono trasferiti a MSL che li trasmette a Terra una volta operativo dopo l'atterraggio.
Qui e
qui ci sono i dettagli riguardanti lo strumento.
Componenti interni
- MMM Digital Electronics Assembly (DEA)
Il DEA interfaccia gli strumenti Mastcam, MAHLI e MARDI con il resto del rover, è in grado di processare in tempo reale le immagini ed eventualmente comprimerle in JPEG.
Realizzato da: Malin Space Science Systems
Parametri principali
- Effettua il controllo dei meccanismi delle fotocamere e ne gestisce l'auto-focus e l'auto-esposizione.
- Composto da 4 "fette" identiche, una per fotocamera.
- Ognuna di queste "fette" dispone di 8 Gigabyte di NAND Flash e di 128 Megabyte di SDRAM.
- Capace di acquisire pixel alla velocità massima di 10 Megapixel/s, equivalenti ad un video a risoluzione 720p (1280×720) a 10fps.
- Può comprimere le immagini acquisite in JPEG in tempo reale ed è in grado di effettuare una compressione lossless di tipo "first-difference predictive".
Qui sono disponibili maggiori informazioni.