Quote:
|
Quote:
Altrimenti, cosa più furba ma più rischiosa, metti come punto iniziale in FindRoot una x molto grande in cui l'ampiezza dell'oscillazione è inferiore ad y(0)/e, incroci le dita sperando che il metodo converga (magari metti un limite superiore sulla x) e la soluzione che ti becca dovrebbe essere quella giusta |
Quote:
A presto, dario! |
ciao,
ho notato che i risultati cambiano in modo strano da una volta all'altra e non conoscendo bene il codice non riesco a trovare il motivo. Mi potresti fornire il codice più semplice possibile senza parametrizzazione ma con la possibilità di introdurre le singole variabili e di plottare ? grazie edit risolto grazie |
Arieccomi
chi mi aiuta a calcolare la trasformata di laplace di questa: -LS/(gΩ)y'' - 2y = (1/(2g))y'|y'|(Lλ/D) ? Grazie! |
Ciao ragazzi, ho bisogno di aiuto per la risoluzione di un paio di trasformate di laplace: il testo (degli ex) sono due grafici (entrambi che vanno da zero a +infinito).
Il primo è quello relativo ad una raddrizzata a doppia semionda quindi ho pensato che posso verderla come il modulo del seno. Ora però non so farne la trasformata (va fatta senza passare per la definizione e quindi l'integrale ma solo con le trasformate notevoli). Il secondo è ralativo ad una raddrizzata a singola semionda e per questo non saprei neanche con che funzione esprimere il grafico, di cui poi andare a fare la trasformata :muro: thx :) |
Qualcuno sa come dimostrare questa disuguaglianza tra numeri reali?
(a + b)^p <= 2^(p-1) * (a^p + b^p) p > 1, a > 0, b > 0 Grazie! |
[Official Thread]Richieste d'aiuto in MATEMATICA: postate qui!
Quote:
Dividendo per 2^p entrambi i membri della disuguaglianza da dimostrare, questa diventa: ((a + b) / 2)^p <= (a^p + b^p) / 2 Per p > 1, la funzione f(x) = x^p è convessa sul semiasse reale positivo... |
salve, mi servirebbe un video corso di analisi matematica 1..ne conoscete uno da consigliare (anche in pvt)?
|
1 Allegato(i)
altra richiesta:
una banale questione di trigonometria: le coordinate del centro sono 0,0 dovrei trovare le coordinate dei punti a e b (320° e 310°) |
Quote:
y=0+r*sin(320) idem per b... |
Quote:
se la formula è giusta mi sa che il problema nel programma dunque sia un altro..:doh: |
altra domanda analfabeta: ma quant'è in radianti 320 e 310? :D
prometto che ripeterò tutta la matematica a partire dalle equazioni appena ho un po' di tempo..:fagiano: |
Quote:
Dopodiché, devi trovare qualche modo astuto di esprimere 40° e 50° in termini di angoli di cui conosci le funzioni trigonometriche: e da lì adoperare tutte le formule che conosci (addizione, sottrazione, prostaferesi, duplicazione, bisezione, ecc.) |
Ciao a tutti, avrei bisogno del vostro aiuto con il seguente codice matlab che calcola banalmente il centro di una circonferenza passante per 3 specifici punti dati
syms a; syms b; syms c; r = input('please insert radius'); teta_grad = input('please insert angle in grad'); teta=(teta_grad*3.14)/180; delta = input('please insert delta at angle'); eq1='r^2 - 2*b*r + c=0'; eq2='((r+delta)*sin(teta))^2 + ((r+delta)*cos(teta))^2 + -2*a*(r+delta)*sin(teta) -2*b*(r+delta)*cos(teta) + c = 0 '; eq3='((-1)*(r+delta)*sin(teta))^2 + ((r+delta)*cos(teta))^2 -2*a*(-1)*(r+delta)*sin(teta) -2*b*(r+delta)*cos(teta) + c = 0'; S=solve(eq1,eq2,eq3,a,b,c); xC=S.a; yC=S.b; disp(xC); disp(yC); il problema è che: yC viene stampato a schermo usando la sue espressione esplicita ma non viene automaticamente calcolato dallo script un valore numerico. Si deve poi copiare l'espressione generata e incollarla sulla finestra principale di matlab per avere il valore numerico. Quindi matlab conosce il valore numerico ma non lo mostra automaticamente come io vorrei. Come posso risolvere? Grazie!! |
Quote:
PS metti pi, non 3.14... |
Quote:
non ti seguo: da quel poco che so per risolvere un sistema di equazioni lineari è imperativo utilizzare il calcolo simbolico |
1 Allegato(i)
scusate la banalità della domanda, ma da quando ho ripreso l'uni ormai mi sono convinto di aver rimosso tutta la matematica dal mio cervello..sono dubbioso pure sulle equazioni :D (cioè..c'è poco da ridere...)
chiedo aiuto in semplice calcolo che ha a che fare con la formula di newton (credo..) ps: ma come cavolo si embedda latex? |
Quote:
|
Quote:
dove [P] sono le parentesi di Iverson, ossia la funzione che vale 1 se il predicato P è vero, e 0 se P è falso. E: sì, è una conseguenza immediata della formula del binomio di Newton. |
Posto solo io qui dentro? :D
Ragazzi chi ha già frequentato e superato il corso di analisi numerica, sa aiutarmi con questi dubbi: -come posso sapere a priori se l'eliminazione di gauss (senza pivoting) fallisce? intendo quando la mat. non è a diagonale dominante, perché in caso di diag. dominante gauss senza pivoting è sempre possibile (condizione nec. e suff.), giusto? -a cosa serve in pratica la fattorizzazione LU? ho molte altre domande anche sui metodi iterativi, mi auguro che qualcuno risponda :stordita: (ho la prova lunedì) |
salve ragazzi, qualcuno sa spiegarmi questa dimostrazione?
Si tratta del coefficiente di correlazione di due Variabili aleatorie, da dove vengono quelle Varianze di somme e differenze? 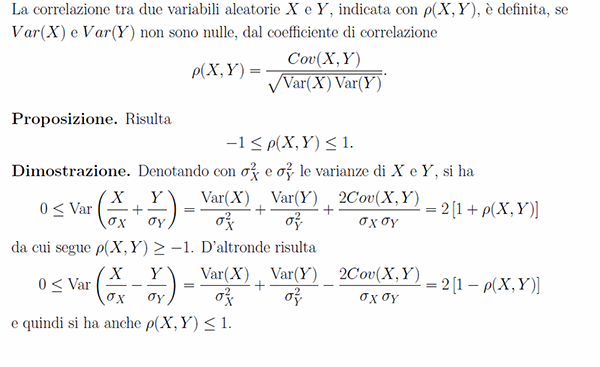 |
Quote:
Se La varianza di una variabile aleatoria non è mai negativa, quindi Per qualunque coppia di variabili aleatorie Siccome La seconda disuguaglianza si dimostra nello stesso mod, con |
grazie, è leggermente più chiaro, quel che non capisco è: se voglio dimostrare una cosa, perché parto da tutto questo popo' di trasformazioni lineari?
ossia Var((X/σ_x)+(Y/σ_y)) ha l'aria di essere una cosa che abbisogni di essere imparata a memoria:muro: cmq volendo fare proprio i pignoli, non è che Varianza sia sempre >0 (vedi variabili degeneri), in questo caso Var(X)>0 per ipotesi :) |
Quote:
In questo, forse si potrebbe anche vedere la covarianza come un prodotto scalare, e applicare la disuguaglianza di Cauchy-Schwarz: ma sto solo congetturando, non è che ci abbia mai provato, e ora come ora non sono neanche sicuro che abbia senso. Quanto al segno della varianza, io avevo parlato di "non negativa", includendo i casi in cui è nulla. Anche nella mia formula c'è il "minore o uguale, forse coperto da quella nella riga dopo. |
rivedevo ancora la tua spiegazione: il denominatore di Cov(X,Y) al secondo passaggio, ossia σ_x*σ_y da dove viene?
Conosco la proprietà di linearità della varianza, ma qui stiamo calcolando la Varianza di una somma, non è che posso aggiungere e togliere termini come voglio..quindi da dove viene? |
Quote:
In generale, è vero che la varianza della somma non è la somma delle varianze. Il termine di correzione, però, è proprio il doppio della covarianza: e questo fa tornare i conti. Ricapitolando:
|
esame fatto, alla fine il prof non mi ha chiesto questa dimostrazione, ma i casi specifici in cui ρ=1 e ρ=-1
:muro: voto: 24 :( |
Sto studiando algebra e analisi, avrei bisogno di un aiutino riguardo le dimostrazioni.
Partiamo dal caso generale che non so affrontare le dimostrazioni. Per me è una cosa nuova e faccio fatica a entrare nell'ordine di idee giusto. Ho l'orale di algebra fra poco quindi intanto mi sto concentrando su quella; non riesco a capire le varie implicazioni logiche che portano a dimostrare un teorema. Facciamo l'esempio del sottospazio generato. Un insieme è un sottospazio se soddisfa: 1) appartenenza di 0, dell'origine 2) se gli elementi sono chiusi rispetto all'addizione 3) se gli elementi sono chiusi rispetto alla moltiplicazione. La uno è banale, le altre due non capisco bene cosa si intende, soprattutto all'atto pratico. Per esempio se devo dimostrare che gli autospazi sono spazi vettoriali... la 1) è verificata perché lo zero è sempre soluzione del sistema A * autovettore = autovalore * autovettore, ma la 2 e la 3 come le dimostro in modo rigoroso? E ancora, i vari passaggi tra matrici... Per esempio la proprietà caratteristica delle matrici ortogonali: A è ortogonale se e solo se A*A(trasp) = I (matrice unità) La dimostrazione dovrebbe essere: A(inv) = A(trasp) --> A * A(trasp) = A * A(inv) = I --> A * A(trasp) = I. Mi sfugge il secondo passaggio. Se comunque avete consigli generici su come affrontare le dimostrazioni benvenga, mi viene male poi quando dovrò studiare quelli di analisi :stordita: |
riguardo i casi specifici aspetta qualcuno più esperto, ma in senso generale ti posso consigliare, anche se forse una bella lettura completa a questa pagina potresti darla.
In un teorema c'è una Tesi, che solitamente è la "formula" vera e propria (o più formule), un'Ipotesi (che è l'insieme delle condizioni sotto le quali la tesi si verifica) e una dimostrazione. La dimostrazione più intuitiva è quella costruttiva, che non fa altro che applicare proprietà matematiche/logiche degli oggetti con cui hai a che fare (proprietà che a loro volta sono frutto di teoremi o assiomi), e quindi con una serie di "manipolazioni" arrivi alla tesi. Le dimostrazioni più semplici che mi vengono in mente sono alcune successioni numeriche: ad esempio la somma dei numeri interi da 0 a 10  Si dimostra semplicemente "sciogliendo" la sommatoria (ossia sommando 0+1+2+3+..+10) e notando che effettivamente è magicamente uguale a (10*10+1)/2 :D |
Quote:
comunque per quanto riguarda i passaggi tra matrici una delle cose che mi sfuggiva è che non vale la proprietà commutativa quindi i passaggi non sono come quelli delle equazioni a cui ero abituato :asd: me ne sono appena accorto |
Quote:
per l'induzione ci sarebbe bisogno di spiegazione più dettagliata..ma tranquillo che neanche quella è difficile |
Quote:
Nel caso del sottospazio, U è un sottospazio di V se succede questo: 1) Lo zero appartiene ad U. 2) Se v e w appartengono entrambi ad u, allora anche u+w appartiene ad U. 3) Se v appartiene ad u e se a è uno scalare arbitrario, allora a * V appartiene ad U. Equivalentemente: U è un sottospazio di V se è un sottoinsieme di V e anche uno spazio vettoriale rispetto alle stesse operazioni di V. All'atto pratico, verificare solo le tre condizioni qui sopra (in realtà, anche solo le ultime due) è più semplice. Quote:
1) Lo zero appartiene a Vs, perché A0 = 0 = s*0. 2) Se u e w appartengono a Vs, allora Au = s*u e Aw = s*w, quindi: A(u+w) = Au + Aw per linearità = su + sw perché sono autovettori corrispondenti ad s = s * (u+w) perché u e w sono elementi di uno spazio vettoriale, nella fattispecie V: per cui, u+w appartiene anch'esso a Vs. 3) Se u appartiene a Vs, e t è uno scalare qualsiasi, allora: A(t * u) = t * Au per le proprietà degli scalari = t * (s * u) perché u è un autovettore corrispondente all'autovettore s = (t * s) * u perché V è uno spazio vettoriale = (s * t) * u perché s e t sono elementi di un campo = s * (t * u) perché V è uno spazio vettoriale: in conclusione, A(t * u) = s * (t * u), e t * u appartiene a Vs. |
Sto cercando di plottare in R3 (tra le altre cose) una retta con GeoGebra, ma non ci riesco proprio. Ho provato anche con Grapher (software integrato in OsX), ma niente. Dov'è che sbaglio? Ho la retta in forma parametrica, e ottengo due equazioni in forma cartesiana che separo con la virgola... :confused: Al massimo qualcuno mi può consigliare un buon software tipo calcolatrice grafica? (meglio se per Mac)
Grazie anticipatamente. PS: spero di postare nella sezione giusta, ho passato 5 minuti buoni a cercare una sezione adatta nel forum, poi mi sono convinto che questo thread fosse quello giusto dato che immagino ci sia parecchia gente che usa software di questo tipo |
Con grapher, quando ti si apre, devi scegliere la scheda 3D e poi scegli default o white.
L'equazione devi poi esprimerla in z=f(x, y) |
Lo so, ma la retta in R3 è l'intersezione di due piani, quindi due equazioni, ma non so come dargliele
|
Prova a guardare questo video se ti può essere di qualche aiuto:
https://www.youtube.com/watch?v=fUqOSdh93EM In pratica x,y,z variabili e t parametro che varia in un intervallo a scelta. È il meglio che ho trovato. Purtroppo per Grapher c'è pochissima documentazione.. Se invece vuoi trovare l'intersezione tra 2 piani z=f(x,y) non penso si possa. So che Mathematica (su mac) può farlo ma è un software di una complessità spaventosa (e a pagamento) |
Quote:
Quote:
Dovrebbe essere: Intersezione[piano1,piano2]->invio e poi clicchi per visualizzarla (pallino da bianco a viola) se non la vedi già Comunque l'ho provato e funziona ecco la guida http://wiki.geogebra.org/it/Comando_Intersezione p.s. io ho usato la versione su browser... magari per la guida per il software installato può tornarti utile questo video https://www.youtube.com/watch?v=oPlS0bv-Xmo |
Grazie mille sia a kwb sia a ciriccio!!! Veramente ieri stavo perdendo la pazienza con questi programmi. Ho provato entrambe le soluzioni sia su Grapher sia su GeoGebra e funzionano. Tuttavia preferisco Grapher (nonostante la scarsa documentazione), perché pare che GeoGebra possa disegnare solo funzioni polinomiali (e per esempio ora avevo bisogno di disegnare z=sin(xy)), cosa che invece Grapher fa tranquillamente.
Ancora grazie per l'aiuto! :D |
puoi pure metterla qui
http://www.math.uri.edu/~bkaskosz/flashmo/graph3d/ ricordati di mettere * per la moltiplicazione xD od anche usare google che se la scrivi bene la plotta lol ciau |
| Tutti gli orari sono GMT +1. Ora sono le: 23:51. |
Powered by vBulletin® Version 3.6.4
Copyright ©2000 - 2024, Jelsoft Enterprises Ltd.
Hardware Upgrade S.r.l.